
JNU-I型机器人智能控制系统是暨南大学机器人智能技术研究院研发的开放式数控系统,它包括逻辑控制(PLC)模块、运动轨迹控制(Motion)模块和集成开发环境(IDE)软件。它开放了系统指令与系统状态参数,通过Modbus协议与第三方的设备互联操作,并通过IDE实现系统的重构与应用程序开发。
JNU-I型机器人智能控制系统PLC模块采用梯形图(LD)编程,Motin模块采用顺序功能框图(SFC)编程,PLC和Motin通过共享区进行数据交互,实现了逻辑控制与运动控制的无缝集成。
JNU-I型机器人智能控制系统适用于各种自动化数控专用设备和专用工业就机器人,系统的控制函数包括直线插补、圆弧插补、螺旋线插补等多种运动轨迹插补函数和180多条梯形图指令。系统基于嵌入式多CPU架构体系,可以根据控制需求重构硬件系统,剪裁软件功能,功能强大、人机界面友好的IDE开发环境可轻松完成应用程序的设计与开发。

IDE软件通过以太网与控制器可靠连接,该工具包可实现程序开发、调试到运行维护,并为自动化工业和商业应用带来了巨大生产力。

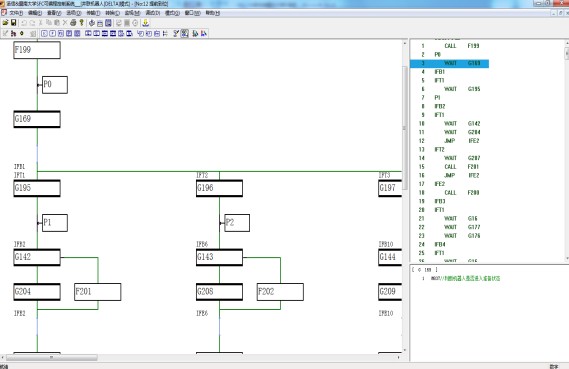
使用梯形图(LD)进行PLC开发; 使用顺序功能图(SFC)进行Motion开发;
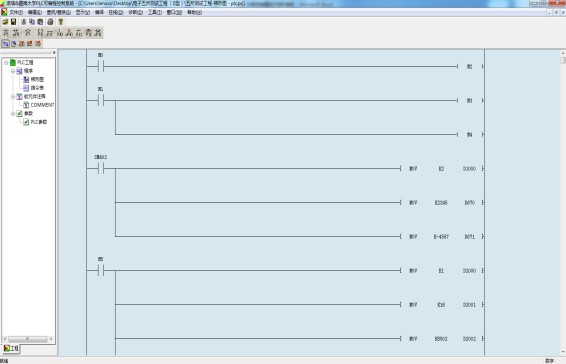
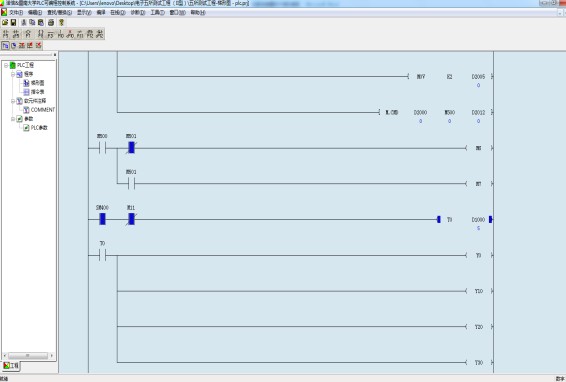
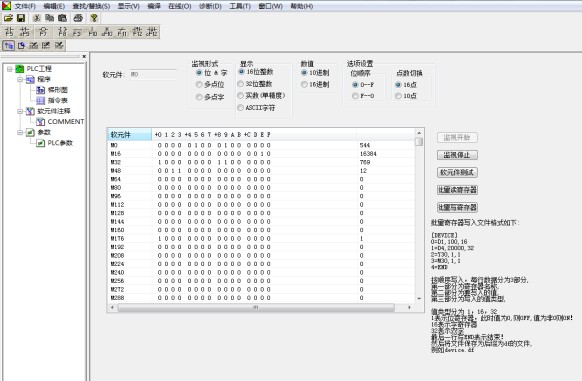
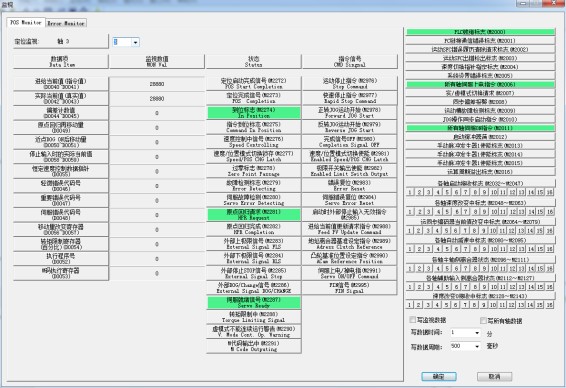
梯形图监视; PLC软元件监视;
伺服监视; SFC 软元件监视;

JNU-I型运动控制器是暨南大学机器人智能技术研究院开发的一款嵌入式运动控制器。它是一种能独立工作的运动控制器,将基于OMAPL138的嵌入式核心主板、运动控制器、端子板合为一体,从而使整体体积更小,连接线更少,各部件结合更紧密,具有可靠性高、升级容易、安装维修方便等特点。它可以作为理想的数控开发平台,构造出完善的数控系统。
·采用高性能的双核ARM+DSP、FPGA技术。
·具有成熟的运动控制功能。
·提供RS485、以太网、扩展I/O、触摸屏等多种接口,开发调试方便、扩展性强。
·每块卡可控制1~6个伺服/步进轴,同时进行1~6轴点位运动控制 。
·可编程伺服恒定扫描周期1ms。
·可编程禁止或使能驱动报警信号和限位信号监测。
·限位触发时自动急停触发轴的运动,驱动报警触发时关闭轴伺服使能。
·可设置跟随误差极限、控制输出极限等,保证控制安全可靠。
·可编程设置Home信号的触发沿,硬件捕获Home信号和编码器Index信号,实现高精度机器原点位置锁存,具有良好的重复定位精度。
·具有在恶劣工业现场环境的设备运行可靠性。
·设备占用空间小。
| 数字量输入输出 | ·36路专用光电隔离输入:原点开关,正、负限位开关,伺服就绪、伺服报警,到位信号; ·通用16路输入,通用16路输出; ·可通过RS 485扩展的通用输入输出达16×8路。 |
| 模拟量输入输出 | ·模拟量输入:可编程输入信号范围0~10V; ·模拟量输出:可编程输出信号范围0~10V; ·周期与占空比可控的PWM波输出(频率:0~30M)。 |
| TCP/IP网络 | ·支持。 |
| 触摸屏 | ·支持(Modbus RTU四线485通信)。 |
| Modbus主站通信 | ·支持(Modbus RTU两线485通信)。 |
| 控制轴数 | ·最多6轴。 |
| 控制方式 | ·指定位置停止速度控制,位置跟踪控制。 |
| 加/减速控制 | ·梯形加减速,S曲线加减速。 |
| 插补功能 | ·直线插补(最多4轴); ·圆弧插补(2轴); ·空间螺旋线插补(3轴); ·小线段插补(2轴); ·SCARA机器人插补(4轴); ·Delta机器人插补(4轴)。 ·五轴联动插补(5轴) |
| 补偿功能 | ·回差补偿。 |
| 位置反馈 | ·接收差分的编码器输入信号(A+、A-、B+、B-、Z+、Z-)。 |
| 运动方式 | ·支持点位(Trap)、速度(Jog)控制。 |
| 电子手轮 | ·支持。 |
| 电机/轴类型 | ·脉冲+方向伺服/步进电机驱动器。 |
| 程序语言 | ·逻辑控制采用梯形图编程; ·运动控制采用运动SFC专用指令编程。 |
| 编程环境 | ·Windows环境下的离线编程。 |
| 接口说明 | ·MPG:用于连接电子手轮; ·LASER:用于激光控制; ·AXIS1~AXIS6:通用脉冲+方向型伺服驱动单元连接口。 |
| 接口形式 | ·标准的DB25插头(具有紧固插接件性能)。 |
| 尺寸 | ·长×宽×高:210mm×176mm×35mm。 |
| 操作系统 | ·Linux、DSP BIOS。 |
| 电源要求 | ·+24V,ICC=2A;外部电源,由用户提供; ·+5V,ICC=2A;外部电源,由用户提供。 |
| 环境要求 | ·工作温度:0~55℃; ·相对湿度:≤80%无凝结。 |
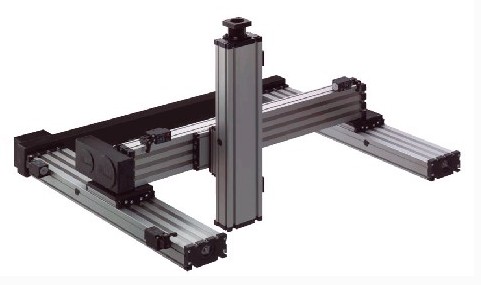
直角坐标机器人; scara机器人;

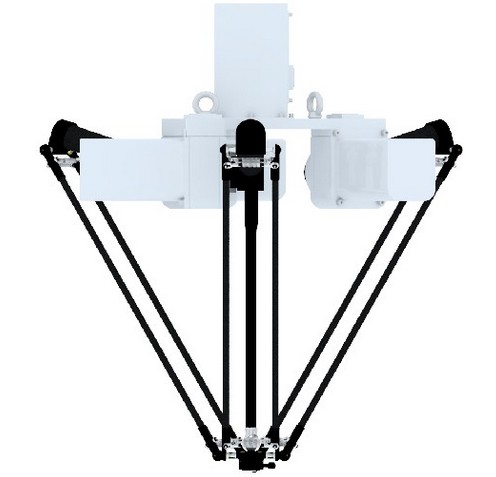
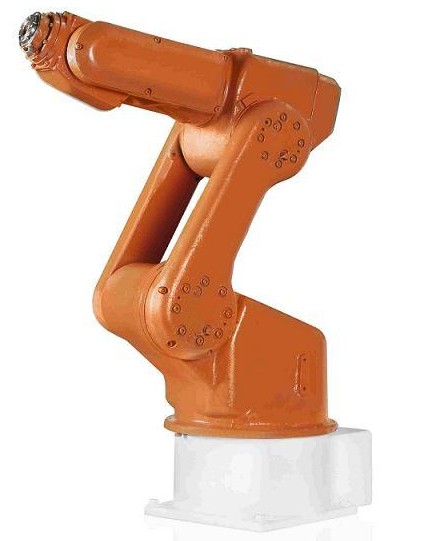
delta机器人; 6轴关节机器人;
JNU-I型多轴运动控制器可用于印刷行业、机器人、数控机床、仓储物流、3C设备、包装行业设备等。
