
JNU-III型多轴运动控制器是一款基于EtherCAT总线运动控制器,它集成了EtherCAT主站解决方案,可控制多达128轴,同时支持EtherCAT IO模块扩展,为用户提供了多轴数、多IO点数的控制解决方案。JNU-III多轴运动控制器支持点位和连续轨迹,直线、圆弧、螺旋线、空间直线插补等运动模式, 该系统使用自主研发的用户应用编程环境,支持IEC61131-3编程标准,给工业应用工程师提供了友善的开发方式,用户可以轻松实现对控制器的应用编程,构建自动化控制系统。
JNU-III型多轴运动控制器可用于机器人、数控机床、3C设备、包装印刷设备、流水线自动化设备控制等。
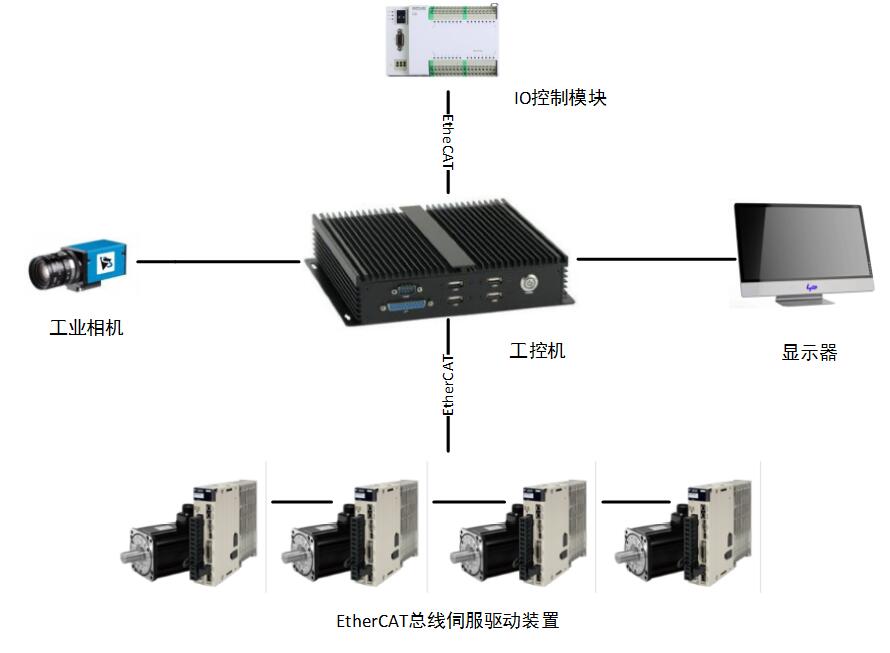
·采用嵌入式工控机平台,提高系统可靠性与稳定性;
·最多支持128轴总线控制;
·支持多达128个总线IO模块扩展;
·支持点位、点动、电子手轮控制;
·具备运动轨迹预处理规划功能;
·支持多厂家带EtherCAT协议通信伺服,如三菱、松下、三洋等;
·支持2-16轴任意搭配插补输出功能;
·支持多种加减速控制,支持2轴、3轴、4轴直线插补,支持空间圆弧、空间螺旋线插补。
·IEC61131-3标准开发环境,集运动控制、逻辑控制、人机交互于一体;
·可与第三方视觉系统无缝连接;
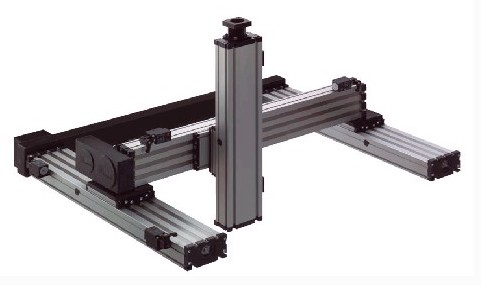
直角坐标机器人; scara机器人;

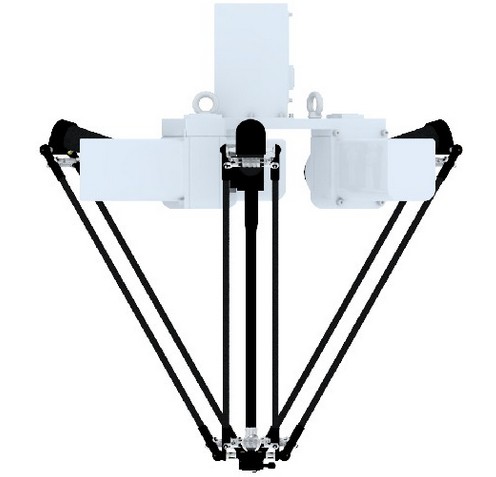
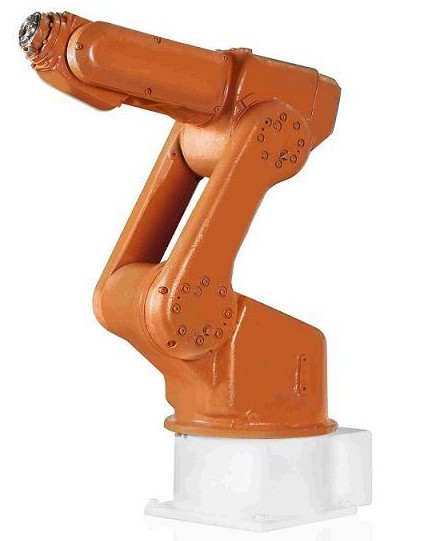
delta机器人; 6轴关节机器人;
JNU-III型多轴运动控制器可用于印刷行业、机器人、数控机床、仓储物流、3C设备、包装行业设备等。
