JNU-3D相机由3D采集单元和运动路径规划单元组成,实现了机器人的“眼睛”与“大脑”功能。
技术原理:通过高速、精准的3D结构光成像系统,对物体表面轮廓进行扫描,形成点云数据;对点云数据进行智能分析处理,加上机器人路径自动规划、自动防碰撞等智能化技术;计算出当前工件实时空间坐标,并引导机器人完成自动抓取任务(整个过程无需示教),实现工业机器人自动化生产线的柔性工装。
主要研究方向:
点云分割、点云配准、三维物体识别、位姿估计、三维视觉与深度学习、路径规划、碰撞检测、视觉引导。
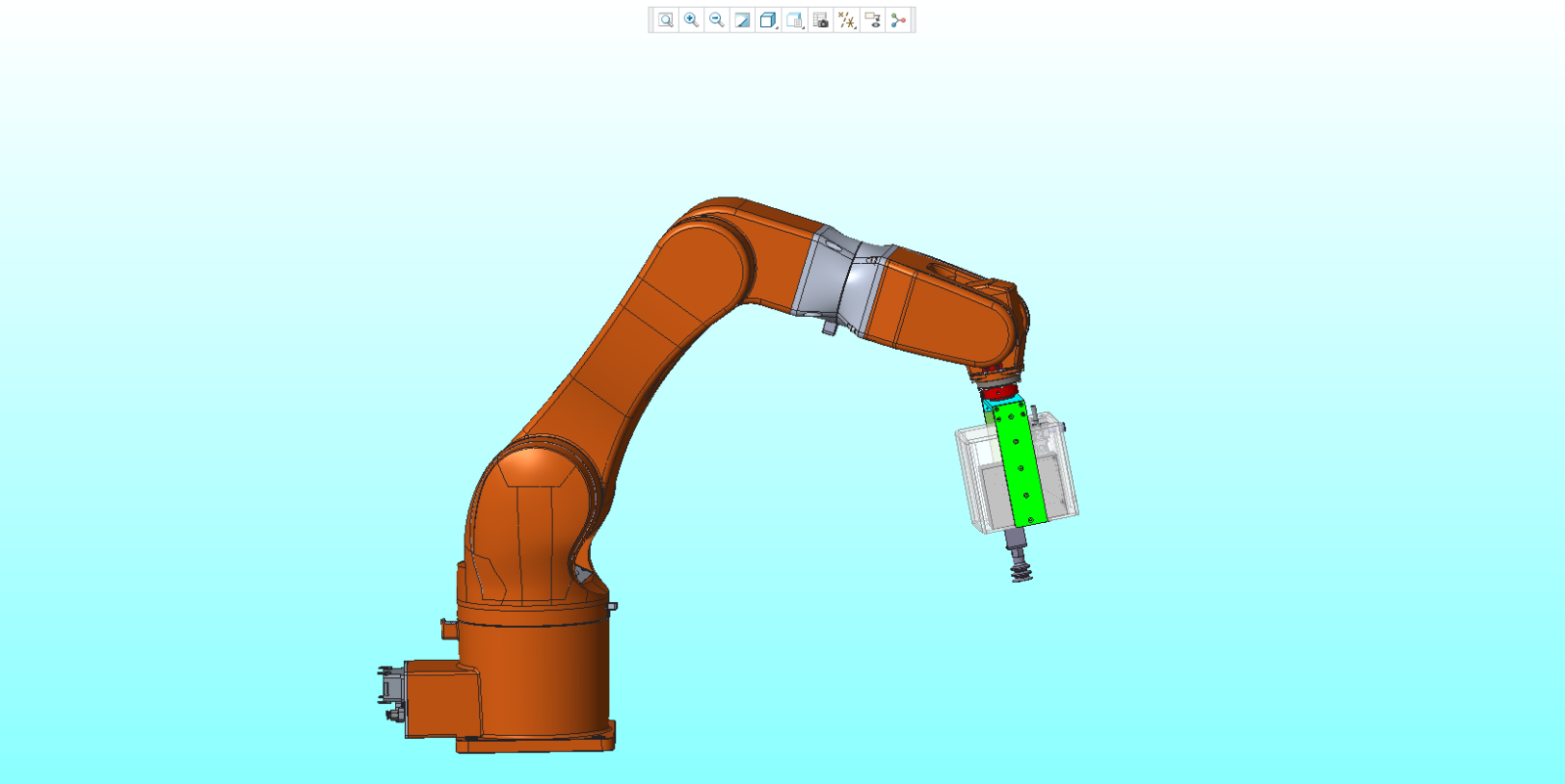
图1 3D相机与机器人的模型

图2 应用场景
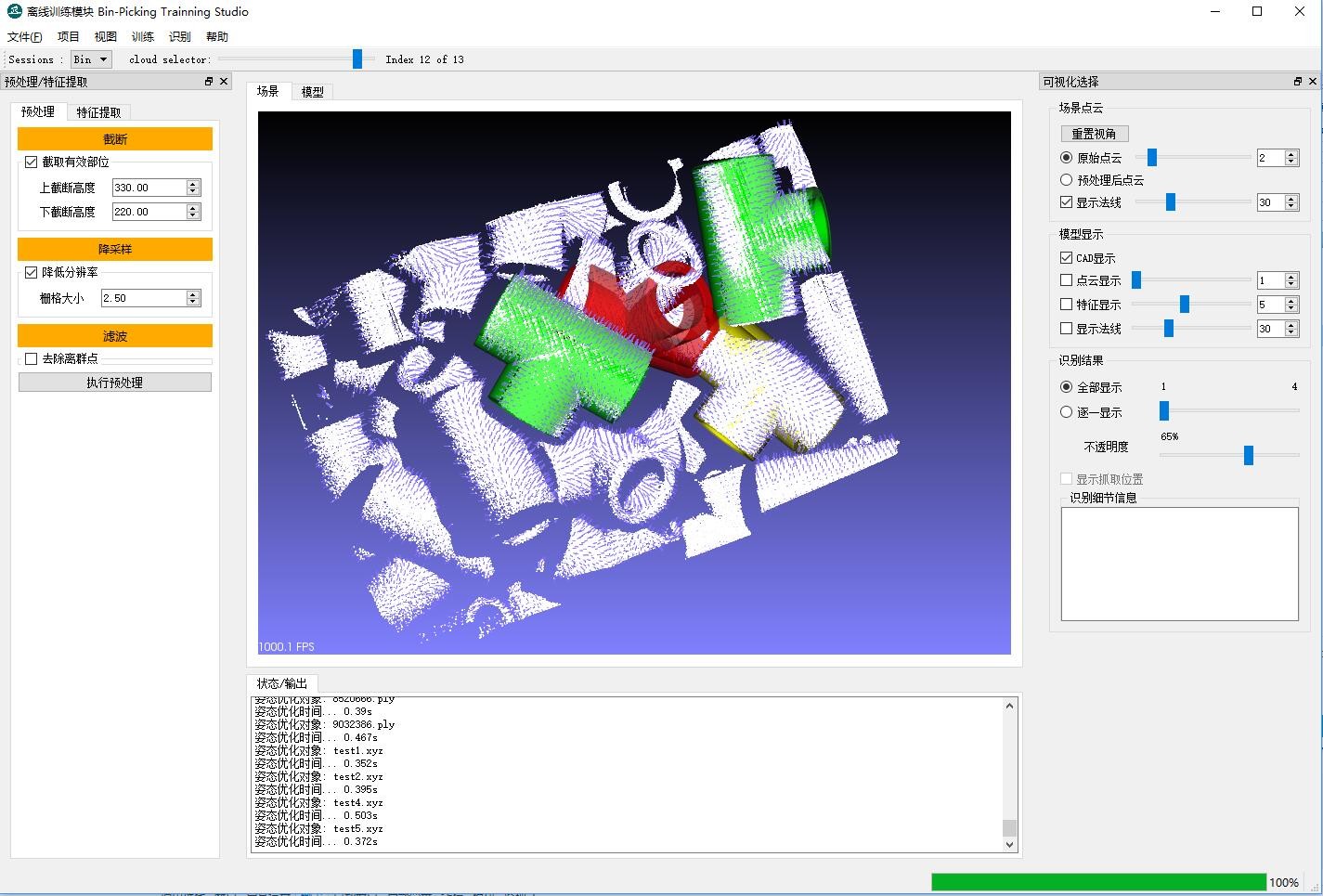
图3 软件界面
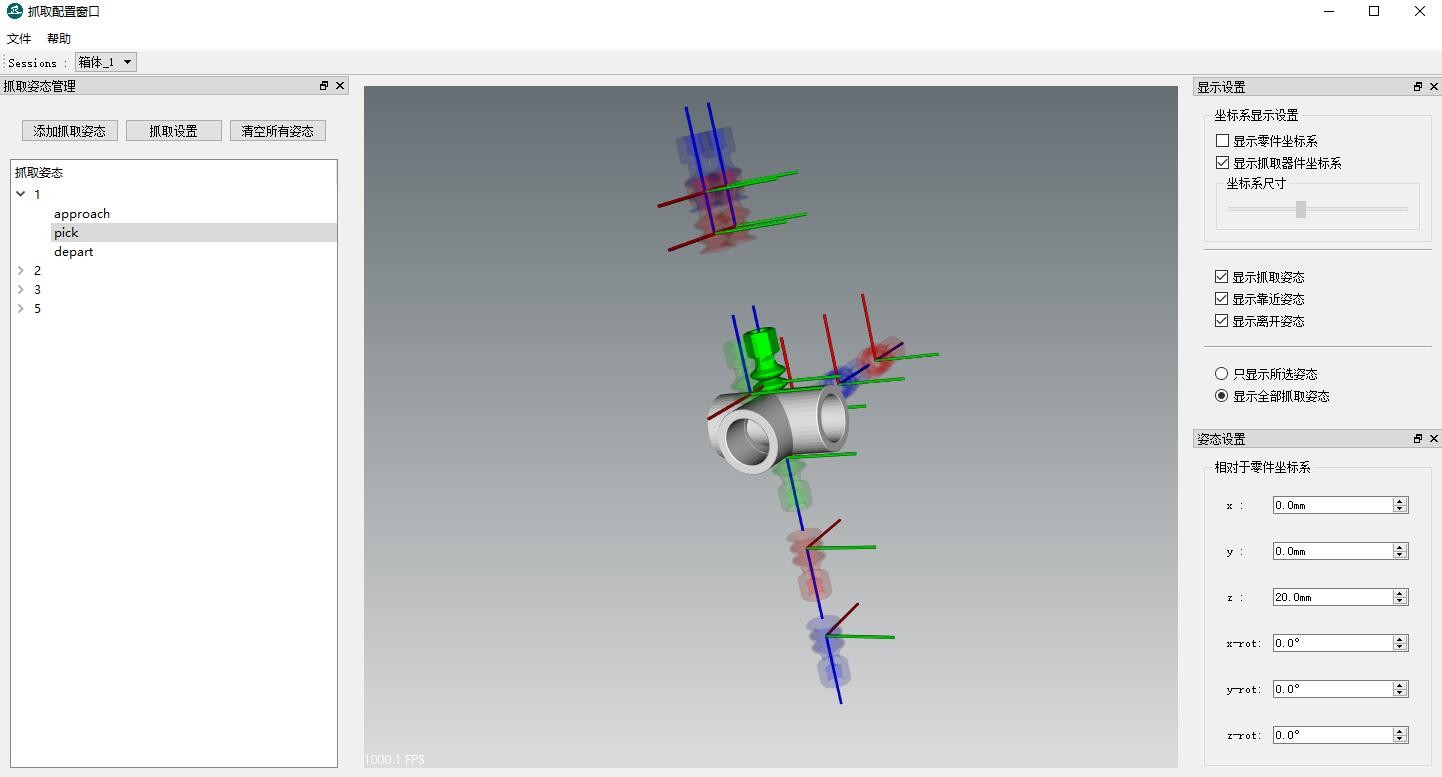
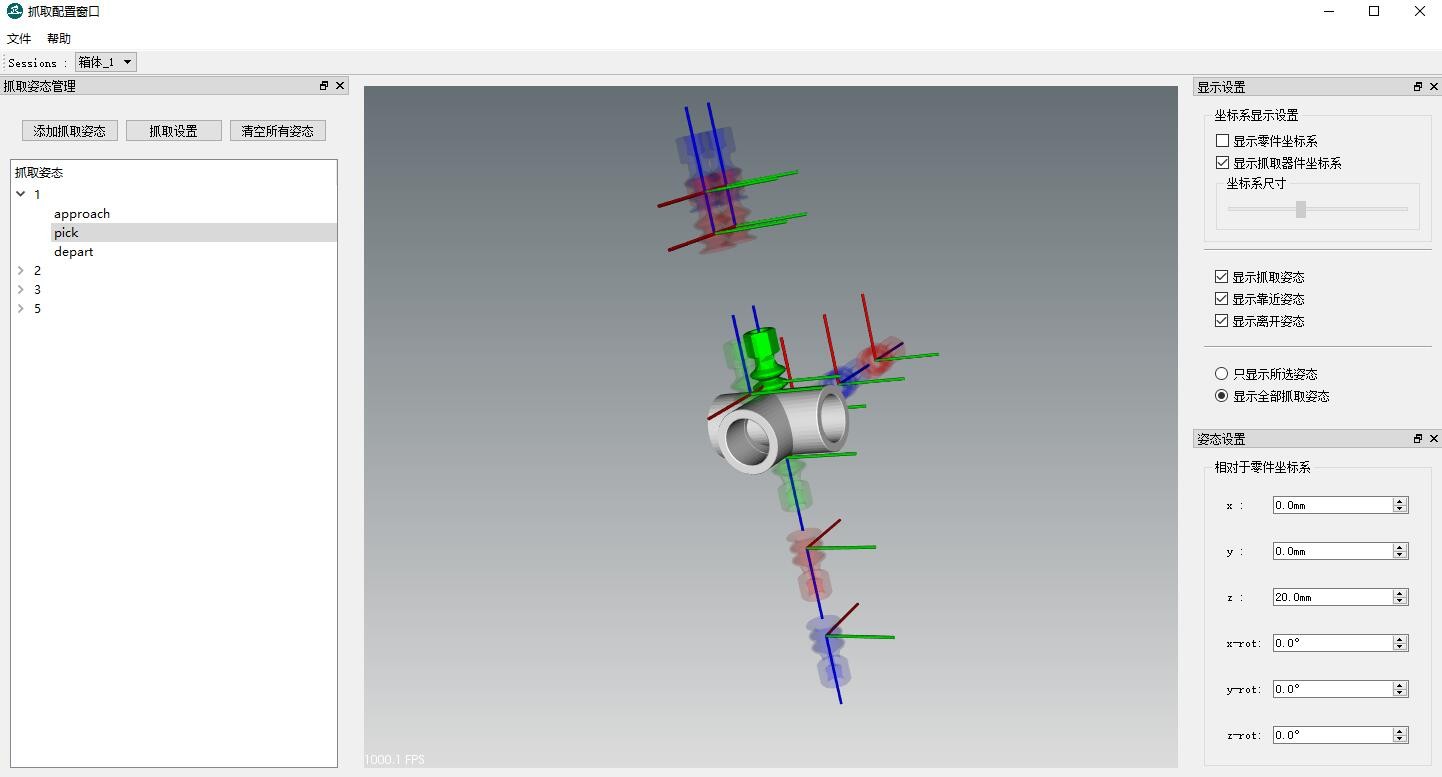
图4 吸盘抓取设置
应用场景:
工厂自动化
3D测量、扫描和检测
料框工件分拣
组装装配
输送带分拣
拆垛/码垛
上下料
订单分拣
机器人
箱子抓取
视觉安全系统
生产过程自动化
碰撞检测
视觉引导
与多种机器人兼容
支持ABB,KUKA,FANUC, YASKAWA,UR等多种机器人